夏如山机器人技术智能集成一体化系统

1 系统简介
夏如山机器人技术智能集成一体化系统是一种将机器人技术与智能集成一体化理念相结合的先进系统。该系统通过集成多种先进技术,如机器人技术、传感器技术、人工智能和通信技术等,旨在提高机器人的智能化水平和工作效率,从而更好地适应复杂多变的应用场景。机器人技术智能集成一体化系统的核心特点是其智能集成一体化设计。该系统采用模块化设计理念,将机器人、传感器、执行器等多个部分集成在一个统一的框架内,实现各部分之间的无缝连接和协同工作。这种设计方式不仅提高了系统的可维护性和可扩展性,还使得系统能够快速适应不同的应用需求。在技术实现上,该系统集成了多种先进技术,以实现高效的环境感知、决策和执行。通过采用高性能的传感器和算法,机器人能够实时感知周围环境的变化,并进行精确的目标识别和定位。同时,系统还集成了人工智能技术,如机器学习和深度学习等,使得机器人能够通过不断的学习和训练,提高自身的智能化水平和工作效率。此外,机器人技术智能集成一体化系统还具备良好的人机交互功能。该系统采用直观的人机界面和自然语言处理等技术,使得用户可以方便地与机器人进行交互,降低操作难度,提高使用体验。这种交互方式有助于实现人机协同工作,提高工作效率和生产力。在实际应用中,机器人技术智能集成一体化系统已经广泛应用于制造业、物流业、医疗保健、救援服务等领域。在制造业中,该系统可以实现自动化生产线上的物料搬运、装配等工作,提高生产效率和质量。在物流业中,该系统可以实现货物的快速分拣和配送,提高物流效率。在医疗保健领域,该系统可以帮助医护人员完成精确的手术操作和病人的照护工作,提高治疗效果和减轻医护人员的工作负担。在救援服务中,该系统可以在复杂环境中自主导航、避障和执行任务,为救援人员提供有力支持。
2 功能介绍
夏如山机器人技术智能集成一体化系统的功能介绍如下:首先,该系统具备强大的环境感知功能。通过集成的传感器技术,机器人能够实时感知周围环境的变化,获取丰富的环境信息。这些传感器包括但不限于激光雷达、摄像头、超声波传感器等,它们能够检测物体的距离、形状、颜色等信息,帮助机器人更好地理解和适应环境。其次,机器人技术智能集成一体化系统具备高度的决策和规划能力。基于强大的计算能力和人工智能算法,机器人能够自主进行任务规划和决策,根据不同的环境和任务需求,制定最优的行动方案。例如,在制造业中,机器人可以根据生产线的需求,自主规划物料搬运和装配的路径和顺序,确保生产的高效进行。此外,该系统还具备良好的人机交互功能。通过自然语言处理和语音识别等技术,用户可以与机器人进行自然语言交流,方便地发出指令和获取信息。同时,系统还支持手势识别、面部识别等技术,使得人机交互更加直观和便捷。这种交互方式不仅提高了工作效率,还降低了用户的操作难度和学习成本。安全性是机器人技术智能集成一体化系统的另一重要功能。系统具备完善的安全防护机制,确保人机交互过程中的数据安全和隐私保护。同时,机器人还具备避障功能,能够自主检测周围障碍物,避免碰撞和意外事故的发生。这种安全防护机制提高了系统的可靠性和稳定性,保护了用户的利益。此外,机器人技术智能集成一体化系统还具备学习能力。通过不断的学习和经验积累,机器人能够逐渐提高自身的智能化水平和工作效率。系统支持在线学习和离线学习两种模式,用户可以根据实际需求选择合适的学习方式。这种学习能力使得机器人能够适应不断变化的环境和应用需求,提高系统的适应性和智能化水平。综上所述,机器人技术智能集成一体化系统的功能包括环境感知、决策与规划、人机交互、安全防护和学习能力等。这些功能使得该系统能够更好地适应复杂多变的应用场景,提高机器人的智能化水平和工作效率,为各领域提供更便捷、更安全的服务。随着技术的不断进步和应用场景的不断拓展,该系统将在未来发挥更加重要的作用,为人类带来更多的便利和福祉。
3 系统运行环境
3.1 服务器端
cpu:AMD Ryzen 7 5800H及以上 系统主存:DDR4 16GBx4及以上外存储器:2TB HDD + 512GB SSD及以上显示设备:23英寸 1920x1080分辨率及以上 LAN:1Gbps及以上 无线网络连接:802.11b:最高11Mbps的传输速度,2.4GHz频率。
3.2 客户端
处理器:Intel Core i7-11800HQ及以上运行内存:DDR3 12GBx4及以上硬盘:2TB HDD + 120GB SSD及以上显示器及尺寸分辨率:21.5英寸 1920x1080分辨率及以上 有线网:25Gbps及以上无线网络连接:802.11ax:最高10Gbps的传输速度,2.4GHz和5GHz频率。
4.操作指南
4.1.1 传感器融合
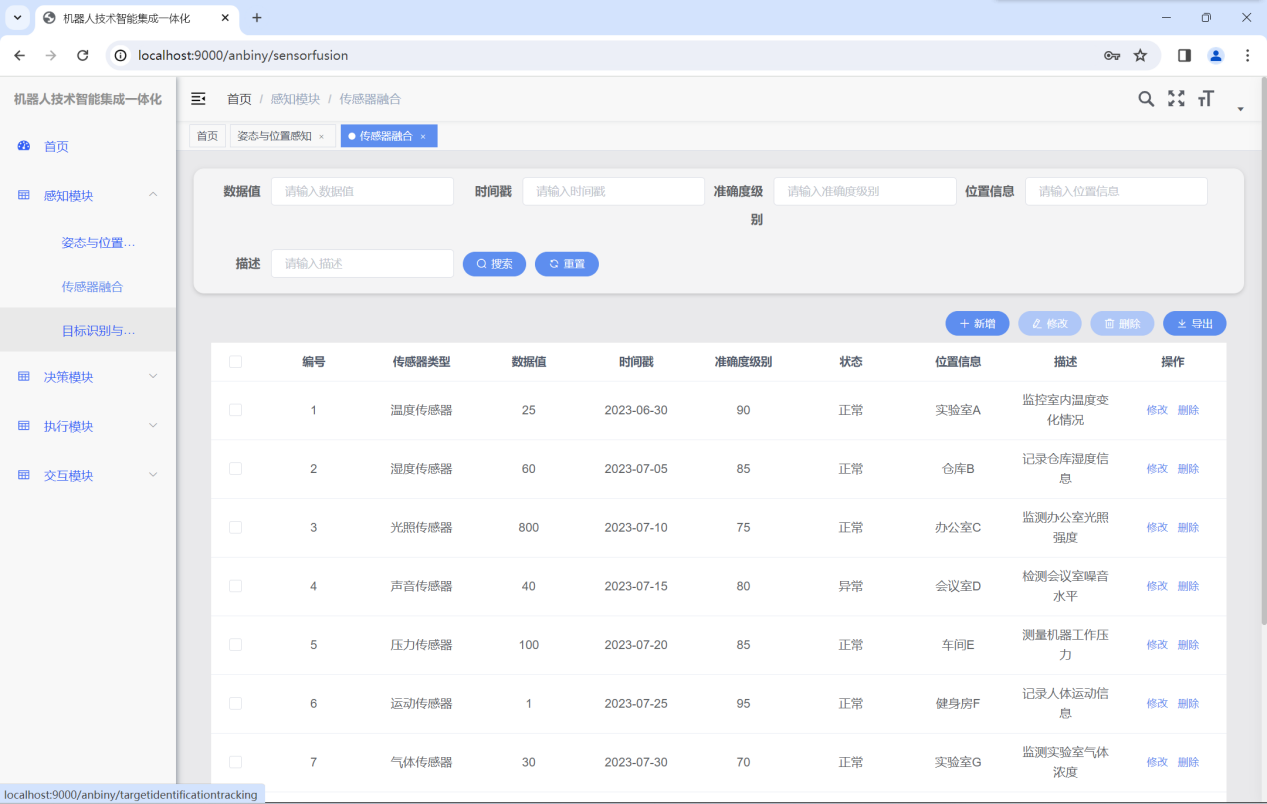
传感器融合是现代机器人技术中的一项关键技术,它通过集成多种传感器,将它们的数据进行综合处理,以提高机器人的感知和理解能力。以下是传感器融合操作指南的简要综述:首先,确定所需传感器类型和配置是至关重要的。根据应用需求,选择适合的传感器,如激光雷达、摄像头、超声波传感器等,并确定它们的数量和安装位置。这有助于确保机器人能够全面地感知周围环境。接下来,进行数据采集和预处理。启动机器人并让传感器开始收集数据,同时进行必要的预处理操作,如滤波、去噪和缩放等。这些处理步骤有助于提高数据的准确性和可靠性,为后续的融合处理提供更好的基础。在预处理后,对数据进行特征提取。针对每个传感器,提取与环境相关的特征信息。例如,从激光雷达数据中提取障碍物的距离和形状特征;从摄像头数据中提取颜色、纹理等特征。这些特征为后续的融合处理提供了重要的信息依据。进入传感器数据融合阶段,将来自不同传感器的数据进行整合。采用适当的融合算法,如卡尔曼滤波、扩展卡尔曼滤波或粒子滤波等,将不同传感器的数据进行加权平均或组合,以获得更准确的环境描述。这一步是传感器融合的核心,它能够充分发挥各种传感器的优势,提高机器人的感知能力。基于融合后的数据,机器人可以进行决策和执行相应的动作。

 合作
合作
 咨询
咨询 帮助
帮助
 产品咨询
产品咨询 